ความเป็นมาและประวัติหุ่นยนต์ และ ความเป็นมาและประวัติอาซิโม และ ชนิดและประเภทของหุ่นยนต์

ความเป็นมาและประวัติหุ่นยนต์
คำว่า Robot มาจากคำว่า Robota ในภาษาเช็ก ซึ่งแปลโดยตรงว่า การทำงานเสมือนทาส ถือกำเนิดขึ้นจากละครเวทีเรื่อง "Rassum's Universal Robots" ในปี ค.ศ. 1920 ซึ่งเป็นบทประพันธ์ของ คาเวล คาเปก เนื้อหาของละครเวทีมีความเกี่ยวพันกับจินตนาการของมนุษย์ ในการใฝ่หาสิ่งใดมาช่วยในการปฏิบัติงาน การประดิษฐ์คิดค้นสร้างหุ่นยนต์จึงถือกำเนิดขึ้นเพื่อเป็นเสมือนทาสคอยรับใช้มนุษย์ การใช้ชีวิตร่วมกันระหว่างหุ่นยนต์และมนุษย์ดำเนินต่อไปจนกระทั่งหุ่นยนต์เกิดมีความคิดเช่นเดียวกันมนุษย์
ในค.ศ. 1942 ไอแซค อสิมอฟ นักเขียนนวนิยายแนววิทยาศาสตร์ได้เขียนเรื่องนวนิยายสั้นเรื่อง Runaround ซึ่งได้ปรากฏคำว่า robot ในนิยายเรื่องนี้ และต่อมาได้นำมารวบรวมไว้ในนิยายวิทยาศาสตร์เรื่อง I-Robot ทำให้นักวิทยาศาสตร์ได้ทำความรู้จักกับคำว่า Robot เป็นครั้งแรกจากนวนิยายเรื่องนี้ (http://th.wikipedia.org/wiki/%E0%B8%AB%E0%B8%B8%E0%B9%88%E0%B8%99%E0%B8%A2%E0%B8%99%E0%B8%95%E0%B9%8C#.E0.B8.9B.E0.B8.A3.E0.B8.B0.E0.B8.A7.E0.B8.B1.E0.B8.95.E0.B8.B4)
และแล้ว หุ่นยนต์ตัวแรกของโลก ก็เกิดขึ้นเมื่อปี 1954 โดย George Devol วิศวกร ชาวสหรัฐอเมริกา ที่สามารถค้นคิดประดิษฐ์แขนของหุ่นยนต์ อย่างง่ายที่สามารถเคลื่อนไหว ทำงานตามโปรแกรมที่ตั้งไว้ใช้ประโยชน์ในงานอุตสาหกรรม จากจุดนี้เองที่ทำให้การพัฒนาหุ่นยนต์เกิดขึ้นอย่างต่อเนื่อง (http://www.eng.ubu.ac.th/~ubuinven/histro1.htm) เช่น หุ่นยนต์ชื่อ Shakey ถูกสร้างให้มีความคิดเป็นของตนเองโดยที่ Shakey จะมีสัญญาณเซนเซอร์เป็นเครื่องบอกสัญญาณในการเคลื่อนที่ไปมา พัฒนาจนหุ่นยนต์ด้านอุตสาหกรรมตัวแรกที่ชื่อ Unimates ได้ถือกำเนิดโดย George Devol และ Joe Engleberger ซึงต่อมา Joe ได้แยกตัวออกมาจาก George โดยเปิดบริษัทสร้างหุ่นยนต์ในชื่อของ Unimation ซึ่งต่อมาผลงานในด้านหุ่นยนต์ของ Joe ได้รับสมญานามว่า "บิดาแห่งหุ่นยนต์ด้านอุตสาหกรรม" (http://th.wikipedia.org/wiki/%E0%B8%AB%E0%B8%B8%E0%B9%88%E0%B8%99%E0%B8%A2%E0%B8%99%E0%B8%95%E0%B9%8C#.E0.B8.9B.E0.B8.A3.E0.B8.B0.E0.B8.A7.E0.B8.B1.E0.B8.95.E0.B8.B4)
ความเป็นมาและประวัติหุ่นยนต์อาซิโม
 อาซิโม ASIMO ย่อมาจาก Advanced Step in Innovative Mobility หมายถึง นวัตกรรมแห่งการเคลื่อนที่อันล้ำสมัยคือหุ่นยนต์ฮิวแมนนอยด์ หรือหุ่นยนต์เลียนแบบมนุษย์ของบริษัทฮอนด้า ประเทศญี่ปุ่น (http://th.wikipedia.org/wiki/%E0%B8%AD%E0%B8%B2%E0%B8%8B%E0%B8%B4%E0%B9%82%E0%B8%A1) สูงเพียง 120 ซม. และหนัก 52 กก. ความเร็ว 1.6 กม.ต่อ ชม. (http://www.pa-orn.com/board/index.php?topic=19.0) หุ่นยนต์อาซิโมคล้ายมนุษย์ คือ มีขา แขน ศีรษะ รวมทั้งมองเห็นได้ถึง 180 องศา สามารถเดิน วิ่ง หรือหยิบจับสิ่งของได้เช่นเดียวกับมนุษย์ อาซิโมแต่ละรุ่นจะมีองศาในการเคลื่อนไหวและการทำงานแตกต่างกัน (http://www.dek-d.com/board/view.php?id=950367) สร้างเมื่อวันที่ 31 ตุลาคม พ.ศ. 2543 พัฒนาโดยทีมวิศวกรเยอรมนี โดยพัฒนาจากหุ่นยนต์ทดลองและหุ่นยนต์ต้นแบบจนทำให้มีขนาดเล็กและน้ำหนักเบา เทคโนโลยี i-WALK ช่วยให้อาซิโมสามารถเดินและวิ่งได้อย่างอิสระเสรี ขึ้นบันไดและเต้นรำได้ มีระบบบันทึกเสียงเพื่อตอบสนองคำสั่งของมนุษย์ สามารถจดจำใบหน้าคู่สนทนาได้อย่างแม่นยำ ซึ่งคุณสมบัติดังกล่าวถูกสร้างขึ้นเพื่อให้อาซิโมมีขีดความสามารถรอบด้าน และรองรับความต้องการของมนุษย์ในอนาคต
อาซิโม ASIMO ย่อมาจาก Advanced Step in Innovative Mobility หมายถึง นวัตกรรมแห่งการเคลื่อนที่อันล้ำสมัยคือหุ่นยนต์ฮิวแมนนอยด์ หรือหุ่นยนต์เลียนแบบมนุษย์ของบริษัทฮอนด้า ประเทศญี่ปุ่น (http://th.wikipedia.org/wiki/%E0%B8%AD%E0%B8%B2%E0%B8%8B%E0%B8%B4%E0%B9%82%E0%B8%A1) สูงเพียง 120 ซม. และหนัก 52 กก. ความเร็ว 1.6 กม.ต่อ ชม. (http://www.pa-orn.com/board/index.php?topic=19.0) หุ่นยนต์อาซิโมคล้ายมนุษย์ คือ มีขา แขน ศีรษะ รวมทั้งมองเห็นได้ถึง 180 องศา สามารถเดิน วิ่ง หรือหยิบจับสิ่งของได้เช่นเดียวกับมนุษย์ อาซิโมแต่ละรุ่นจะมีองศาในการเคลื่อนไหวและการทำงานแตกต่างกัน (http://www.dek-d.com/board/view.php?id=950367) สร้างเมื่อวันที่ 31 ตุลาคม พ.ศ. 2543 พัฒนาโดยทีมวิศวกรเยอรมนี โดยพัฒนาจากหุ่นยนต์ทดลองและหุ่นยนต์ต้นแบบจนทำให้มีขนาดเล็กและน้ำหนักเบา เทคโนโลยี i-WALK ช่วยให้อาซิโมสามารถเดินและวิ่งได้อย่างอิสระเสรี ขึ้นบันไดและเต้นรำได้ มีระบบบันทึกเสียงเพื่อตอบสนองคำสั่งของมนุษย์ สามารถจดจำใบหน้าคู่สนทนาได้อย่างแม่นยำ ซึ่งคุณสมบัติดังกล่าวถูกสร้างขึ้นเพื่อให้อาซิโมมีขีดความสามารถรอบด้าน และรองรับความต้องการของมนุษย์ในอนาคต
หุ่นยนต์ฮิวแมนนอยด์ แสดงให้เห็นถึงความพยายามและความมุ่งมั่น ในการศึกษาและวิจัยของทีมวิศวกรของบริษัทฮอนด้า เป็นสิ่งประดิษฐ์ที่อาศัยเทคโนโลยีชั้นสูงในการสร้างสรรค์ผลงาน โดยความคิดสร้างสรรค์และความยึดมั่นในความคิดที่หุ่นยนต์สามารถอยู่ร่วมกับมนุษย์ได้นั้น เป็นแรงผลักดันให้ทีมวิศวกรของบริษัทฮอนด้า สามารถสร้างหุ่นยนต์อาซิโมให้มีความเป็นอยู่ร่วมกับมนุษย์และอำนวยความสะดวกต่าง ๆ แก่สังคม ได้รับแรงบันดาลใจจากนิยายวิทยาศาสตร์ ทำให้หุ่นยนต์อาซิโมในศตวรรษที่ 21 ที่เกิดจากจินตนาการของไอแซค อสิมอฟ กลายเป็นความจริง สามารถมีสมองและความคิดได้เช่นเดียวกับมนุษย์
อาซิโมได้รับการออกแบบให้สามารถใช้งานได้อย่างง่ายดาย ไม่ว่าจะเป็นการควบคุมด้วยคอมพิวเต อร์แบบตั้งโต๊ะหรือการควบคุมระยะไกล ทีมวิศวกรเริ่มต้นคิดค้น พัฒนาศึกษาวิจัยหุ่นยนต์ฮิวแมนนอยด์ตั้งแต่ปี พ.ศ. 2529 โดยเริ่มจากการสร้างหุ่นยนต์ต้นแบบ P2 ในปี พ.ศ. 2539 และต่อด้วยหุ่นยนต์ต้นแบบ พีทรี (P3) ในปี พ.ศ. 2540 จนกระทั่งมาถึงหุ่นยนต์อาซิโมในปี พ.ศ. 2543 ปัจจุบันฮอนด้าได้เปิดโอกาสให้เช่าอาซิโมเพื่อใช้งานในประเทศญี่ปุ่น (http://th.wikipedia.org/wiki/%E0%B8%AD%E0%B8%B2%E0%B8%8B%E0%B8%B4%E0%B9%82%E0%B8%A1)
อร์แบบตั้งโต๊ะหรือการควบคุมระยะไกล ทีมวิศวกรเริ่มต้นคิดค้น พัฒนาศึกษาวิจัยหุ่นยนต์ฮิวแมนนอยด์ตั้งแต่ปี พ.ศ. 2529 โดยเริ่มจากการสร้างหุ่นยนต์ต้นแบบ P2 ในปี พ.ศ. 2539 และต่อด้วยหุ่นยนต์ต้นแบบ พีทรี (P3) ในปี พ.ศ. 2540 จนกระทั่งมาถึงหุ่นยนต์อาซิโมในปี พ.ศ. 2543 ปัจจุบันฮอนด้าได้เปิดโอกาสให้เช่าอาซิโมเพื่อใช้งานในประเทศญี่ปุ่น (http://th.wikipedia.org/wiki/%E0%B8%AD%E0%B8%B2%E0%B8%8B%E0%B8%B4%E0%B9%82%E0%B8%A1)
ชนิดและประเภทของหุ่นยนต์
หุ่นยนต์อาจแยกได้เป็น ๒ ประเภทใหญ่ ๆ คือ หุ่นยนต์ใช้บ้าน (domestic robot) และหุ่นยนต์อุตสาหกรรม (industrial robot)
1. หุ่นยนต์ใช้ในบ้าน เริ่มมีการใช้กันบ้างในต่างประเทศ เช่น ใช้ทำงานดูดฝุ่น ทำความสะอาดบ้าน เปิดประตูต้อนรับแขก และยกอาหารจากครัวมายังโต๊ะอาหาร เป็นต้น
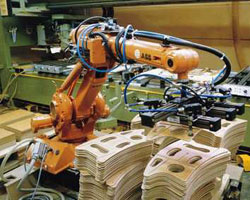
2. หุ่นยนต์อุตสาหกรรม เป็นอุปกรณ์ที่สร้างขึ้น เพื่อเลียนแบบการทำงานของอวัยวะส่วนบนของมนุษย์ประกอบด้วยระบบที่สำคัญ ๒ ระบบ คือ ระบบทางกลของหุ่นยนต์ (mechanism system) และระบบควบคุมหุ่นยนต์ (control system)
2.1 ระบบทางกลของหุ่นยนต์อุตสาหกรรมประกอบด้วยอุปกรณ์ที่ใช้จับ หยิบเคลื่อนย้ายและหมุนได้อย่างอิสระใน ๒ มิติ หรือ ๓ มิติ ควรมีความมั่นคงและมีน้ำหนักน้อยเพื่อประหยัดพลังงานในการเคลื่อนไหว
2.2 ระบบควบคุมหุ่นยนต์ประกอบด้วยอุปกรณ์ควบคุมซึ่งควบคุมการทำงานของหุ่นยนต์โดยอัตโนมัติด้วยคอมพิวเตอร์นับเป็นส่วนสำคัญที่สุดของหุ่นยนต์ ระบบควบคุมนี้ทำหน้าที่เป็นสมองเก็บข้อมูล สั่งหุ่นยนต์ให้ทำงานตรวจสอบและควบคุมรายละเอียดของการทำงานให้ถูกต้อง
(http://teamrobot.multiply.com/journal/item/10 , http://www.9engineer.com/index.php?m=article&a=show&article_id=888 )


ช่วยด้วยครับ
นักเรียนที่สร้างบล็อก กรุณาอย่า
คัดลอกข้อมูลจากเว็บอื่นทั้งหมด
ควรนำมาจากหลายๆ เว็บ แล้ววิเคราะห์ สังเคราะห์ และเขียนขึ้นใหม่
หากคัดลอกทั้งหมด จะถูกดำเนินคดี
ตามกฎหมายจากเจ้าของลิขสิทธิ์
มีโทษทั้งจำคุกและปรับในอัตราสูง
ช่วยกันนะครับ
ไทยกู๊ดวิวจะได้อยู่นานๆ
ไม่ถูกปิดเสียก่อน
ขอขอบคุณในความร่วมมือครับ
ด่วน...... ขณะนี้
พระราชบัญญัติลิขสิทธิ์ (ฉบับที่ 2) พ.ศ. 2558
มีผลบังคับใช้แล้ว
ขอให้นักเรียนและคุณครูที่ใช้งาน
เว็บ thaigoodview ในการส่งการบ้าน
ระมัดระวังการละเมิดลิขสิทธิ์ด้วย
อ่านรายละเอียดที่นี่ครับ